技术分享 · Agent 架构 · Tool Use 机制 · LLM
1. OpenClaw 架构
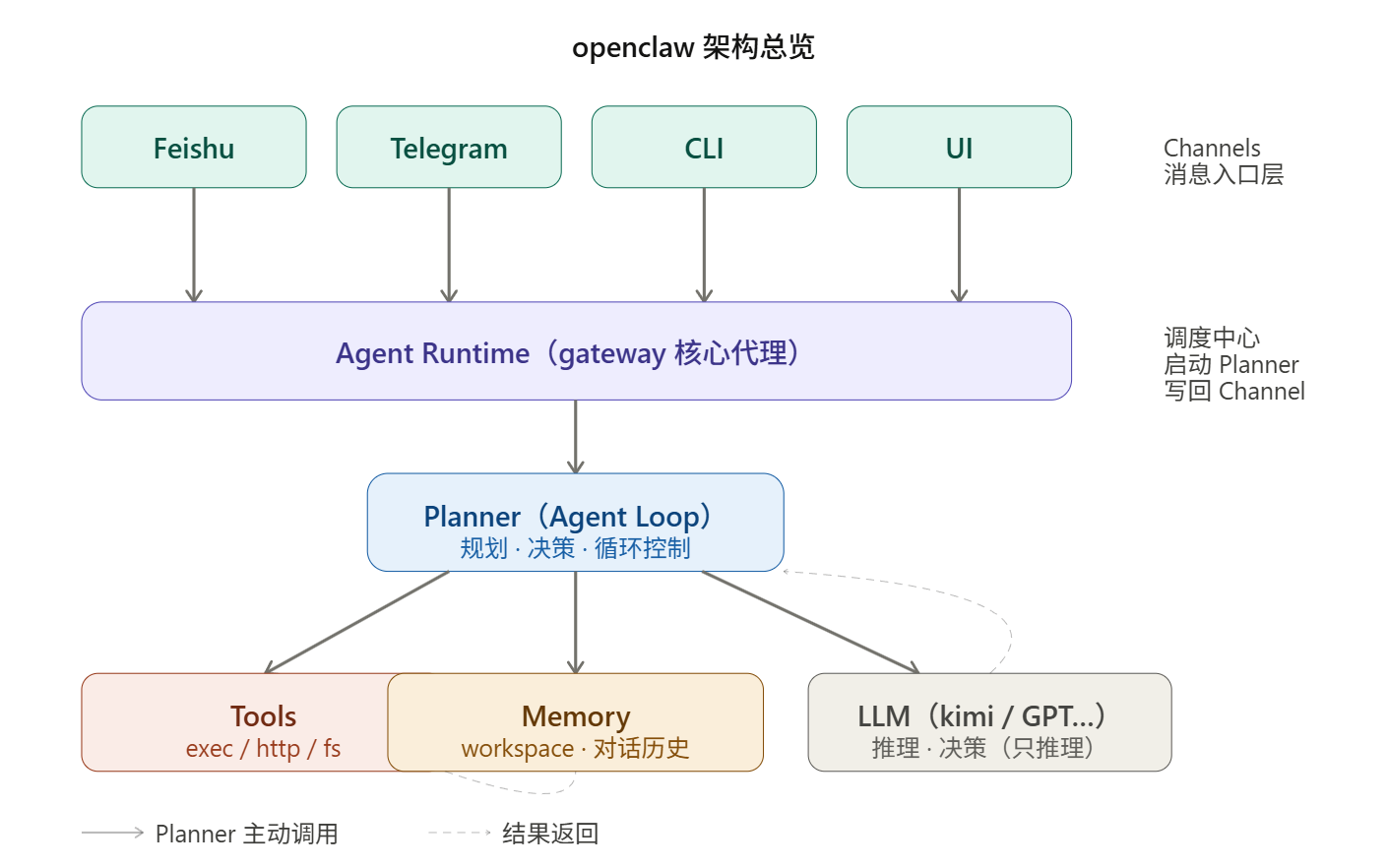
消息从 Channels 进入 Agent Runtime,由 Planner 驱动循环,Tools / Memory / LLM 均由 Planner 主动调用。
组件对照表
| 模块 | OpenClaw 组件 | 职责 |
|---|---|---|
| Channels | Feishu / Telegram / CLI / UI | 消息入口,接收用户指令并返回结果 |
| Agent Runtime | gateway 核心代理 | 启动 Planner,监听任务完成信号,将最终结果写回 Channel |
| Planner | Agent Loop 的具体实现 | 规划任务步骤,驱动"LLM → tool_use → 执行 → 观察"循环 |
| Tools | exec / http / fs | 实际执行动作的原子能力 |
| Memory | workspace | 维护对话历史、tool_result,是两轮对话之间的纽带 |
| LLM | 模型 provider(kimi 等) | 推理与决策引擎,被 Planner 主动调用,只做推理不做执行 |
注意:Planner 实现了 Agent Loop,Agent Loop 是 Planner 的运行机制。Tools 和 LLM 都由 Planner 在循环中主动调用,不由 Agent Runtime 直接驱动。
2. 各模块详解
Channels — 消息入口层
用户与 openclaw 交互的渠道,支持多端接入:
- Feishu:企业内部飞书机器人,最常见的生产环境接入方式
- Telegram:面向个人用户或小团队的快速接入
- CLI:命令行直接调用,适合开发调试和自动化脚本
- UI:Web 聊天对话页面
Channel 只负责收发消息,不参与任何业务逻辑,实现了接入层与业务层的解耦。
Agent Runtime — 核心驱动
整个系统的调度中心,职责是:
- 从 Channel 接收用户消息
- 启动 Planner,将消息交给 Agent Loop 处理
- 监听 Planner 的完成信号
- 将最终结果写回 Channel 展示给用户
Agent Runtime 不直接调用 Tools 或 LLM。这两者都由 Planner 在循环内部驱动。
Planner — 任务规划器(Agent Loop 的实现)
Planner 实现了 Agent Loop,是 openclaw 能自主执行多步骤任务的核心。每一轮循环包含完整的"推理 → 决策 → 执行 → 观察"链路:
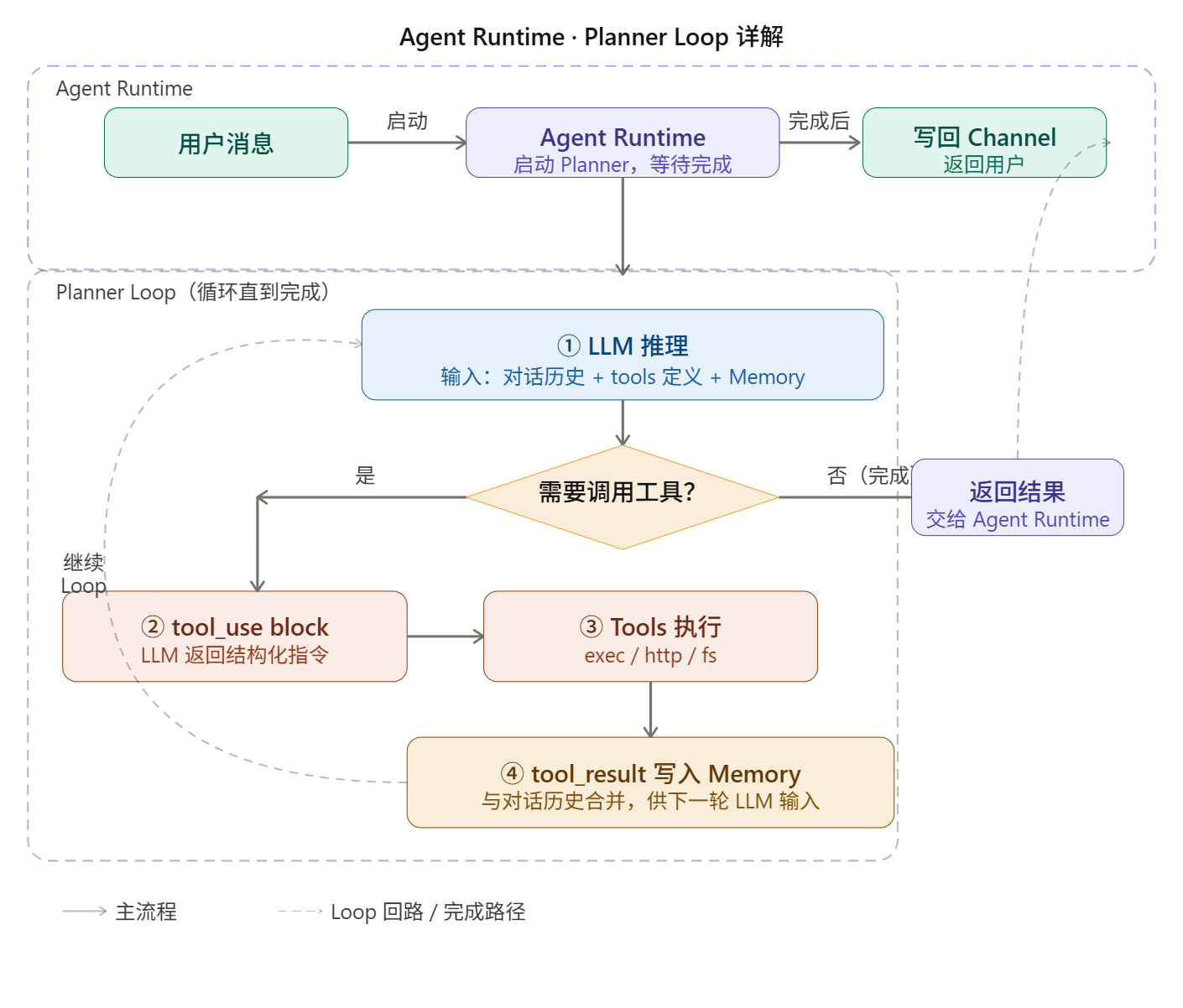
LLM 推理 → 判断是否需要工具 → 返回 tool_use block → Tool 执行 → tool_result 写入 Memory → 下一轮 LLM 输入;直到 LLM 判断任务完成,输出自然语言回答。
关键特性:
- Planner 负责循环控制流(“推进”),LLM 负责每步推理(“想”)
- tool_use block 是 LLM 发出的结构化指令,触发 Tool 执行
- tool_result 写入 Memory 后才能被下一轮 LLM 读取,这是两轮对话的核心机制
Tools — 原子执行层
Tools 是 openclaw 真正"干活"的地方,三类核心工具:
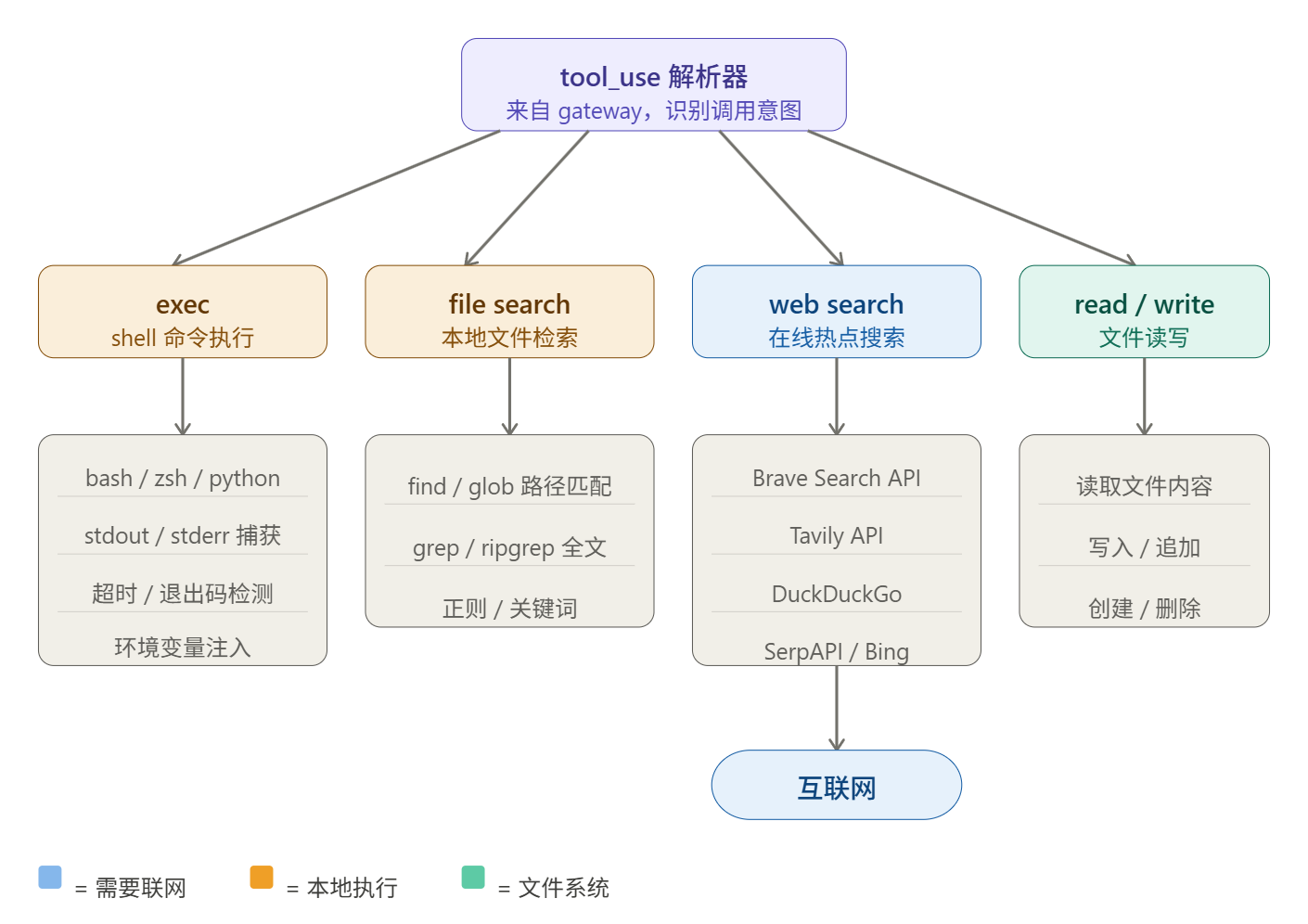
exec/file_search — shell 命令执行(本地)
- 执行任意 bash / zsh / python 命令
- 捕获 stdout / stderr
- 超时检测 + 退出码处理
http — HTTP 请求(需联网)
- 调用外部 REST / GraphQL API
- 在线搜索(Brave Search / Tavily / SerpAPI / DuckDuckGo)
- Webhook 触发
fs — 文件系统操作(本地)
- 读取 / 写入 / 追加文件
- glob / ripgrep 文件搜索
- 创建 / 删除目录
Memory — 工作区与上下文
Memory 是 Agent 的"工作台",解决 LLM 无状态的核心问题:
| 类型 | 内容 | 作用 |
|---|---|---|
| 对话历史 | 用户消息 + 历轮 LLM 回复 | 保持上下文连贯 |
| tool_use block | LLM 发出的工具调用指令 | 触发 Tool 执行的结构化指令,存入历史供追溯 |
| tool_result | Tools 执行后的原始输出 | 两轮对话之间的纽带,喂回 LLM 做第二轮推理 |
| workspace | 任务中间产物(文件、变量) | 跨步骤共享数据 |
区分 tool_use block 与 tool_result:tool_use block 是"LLM 发出的指令",是第一轮的产物;tool_result 是"Tool 执行后的结果",是两轮之间真正的传递载体。
LLM — 推理与决策引擎
LLM 是整个系统的大脑,只做推理,不做执行,由 Planner 在每轮循环中主动调用:
|
|
openclaw 支持多种 LLM provider,通过配置切换:kimi、GPT-4、Claude、本地模型等。
3. 完整工作流程(两轮对话)
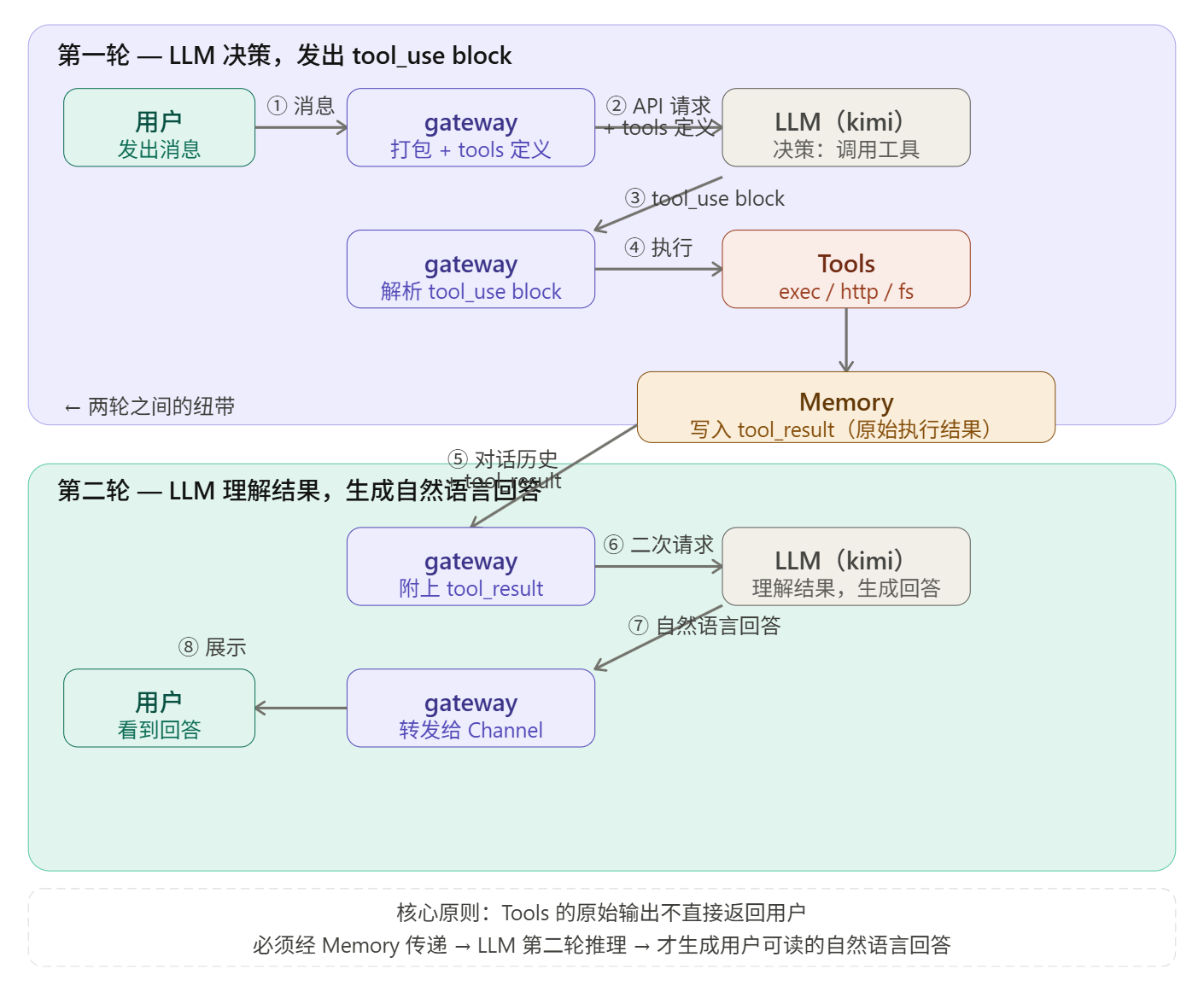
第一轮:gateway 将用户消息 + tools 定义发给 LLM,LLM 返回 tool_use block,Planner 解析后执行 Tool,结果写入 Memory。第二轮:gateway 将对话历史 + tool_result 再次发给 LLM,LLM 生成自然语言回答返回给用户。
核心原则:Tools 执行的原始输出不直接给用户,必须经 LLM 第二次推理后才返回。Memory 中的 tool_result 是两轮之间的纽带。
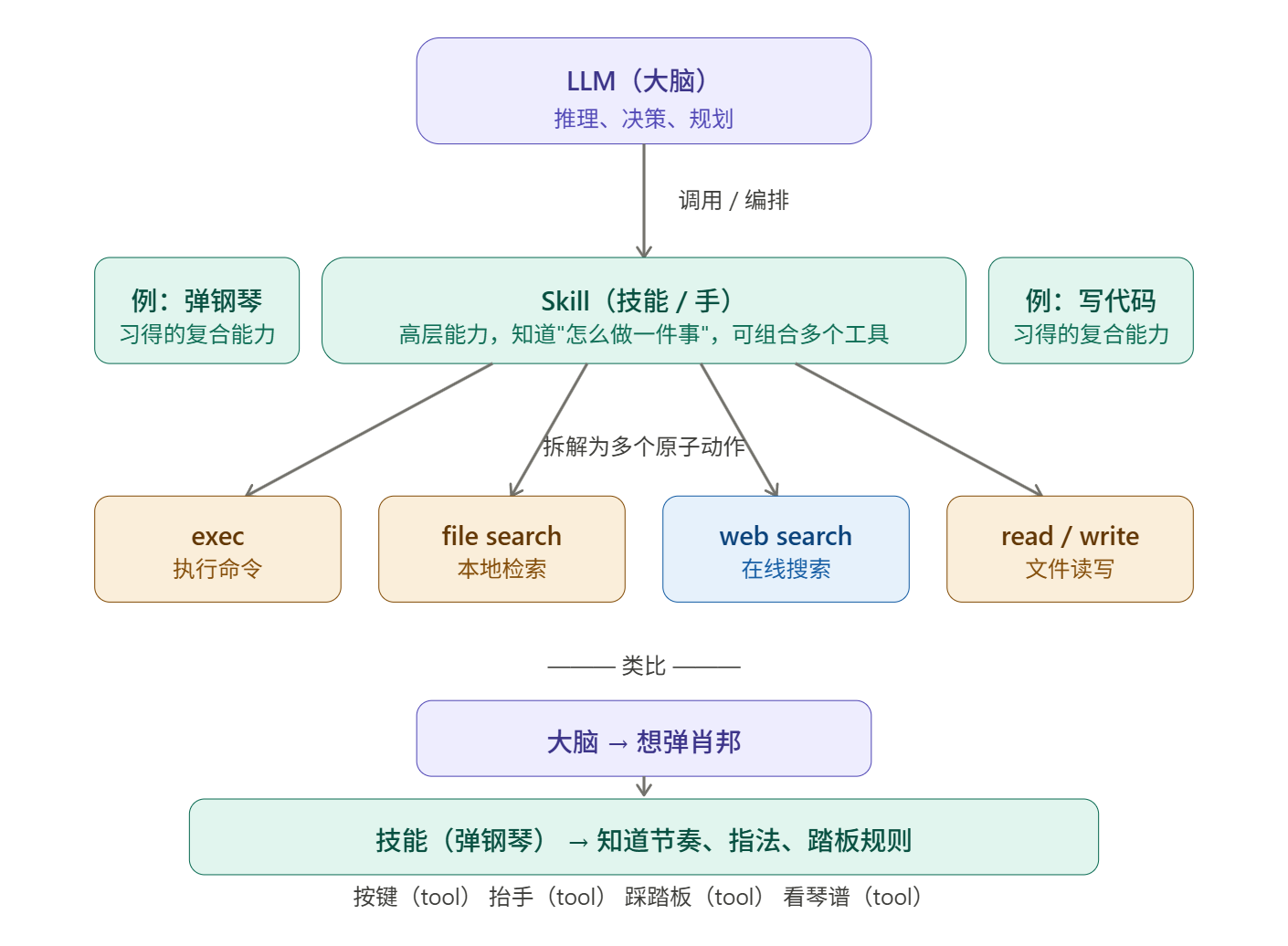
4. Tools · Skills · Agent 三层类比
LLM = 大脑 · Tools = 手的动作 · Skills = 习得技能 · Agent = 整个人
| 概念 | 类比 | 本质 |
|---|---|---|
| Tools | 按键、抬手 | 原子动作,每个只做一件事,不知道为什么做 |
| Skills | 弹钢琴 | 对 Tools 的预定义编排(固定顺序和组合),例如"搜索 + 总结"是一个 Skill |
| Agent | 整个工程师 | 自主循环直到任务完成,会规划、会判断 |
说明:Skills 是预定义的多步骤工作流,与 Tools 的区别在于它知道顺序和目的;而 Agent(Planner)是在运行时由 LLM 动态决定如何组合 Tools,不受固定编排限制。
5. 总结
openclaw = 一个完整的 AI Agent
| # | 要点 | 说明 |
|---|---|---|
| 01 | 多渠道接入 | Feishu / Telegram / CLI / UI,接入层与业务层解耦 |
| 02 | Agent Runtime 只是调度器 | 启动 Planner、监听完成、写回 Channel;循环逻辑在 Planner 内 |
| 03 | Planner 实现 Agent Loop | 驱动"LLM 推理 → tool_use → Tool 执行 → tool_result → 下一轮"循环 |
| 04 | 两轮对话完成任务 | 第一轮 LLM 决策并发出 tool_use block,第二轮 LLM 读取 tool_result 生成回答 |
| 05 | Memory 是两轮之间的纽带 | tool_result 经 Memory 传递,LLM 才能在第二轮理解执行结果 |
| 06 | LLM 只做推理 | 真正执行在 Tools(exec / http / fs),LLM 不直接操作环境 |
| 07 | 工具可插拔 | Tools 和 LLM provider 均可通过配置灵活切换 |
openclaw 技术分享
